绪论 单元测试
1、单选题:
下列语句中,不正确的是( )。
选项:
A:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;
B:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;
C:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
D:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;
答案: 【现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
】
2、单选题:
通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为( )。
选项:
A:放大元件
B:比较元件
C:给定元件
D:反馈元件
答案: 【比较元件
】
3、单选题:
闭环控制系统的控制方式为( )。
选项:
A:按偏差信号控制
B:按反馈信号控制
C:按扰动信号控制
D:按输入信号控制
答案: 【按偏差信号控制
】
4、多选题:
经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统( )
选项:
A:非线性系统
B:线性定常系统
C:单输入单输出系统
D:多输入多输出系统
答案: 【线性定常系统
;单输入单输出系统
】
5、多选题:
现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统( )
选项:
A:线性定常系统
B:线性时变系统
C:多输入多输出系统
D:非线性系统
答案: 【线性定常系统
;线性时变系统
;多输入多输出系统
;非线性系统
】
第一章 单元测试
1、判断题:
系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的( )
选项:
A:对
B:错
答案: 【对】
2、判断题:
多输入-多输出系统的U-Y 间的传递函数为 ( )
( )
选项:
A:错
B:对
答案: 【对】
3、判断题:
由一个状态空间模型可以确定多个传递函数。( )
选项:
A:对
B:错
答案: 【错】
4、单选题:
线性定常系统的数学模型描述是( )。
选项:
A:
B:
C:
D:
答案: 【
】
5、单选题:
已知质量-弹簧-阻尼系统如下图所示:
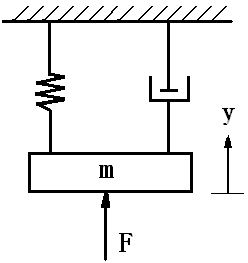
图中质量为 的物体受到外力F的作用,产生位移
的物体受到外力F的作用,产生位移 。以外力F为输入和位移为输出,系统状态空间模型为( )。
。以外力F为输入和位移为输出,系统状态空间模型为( )。
选项:
A: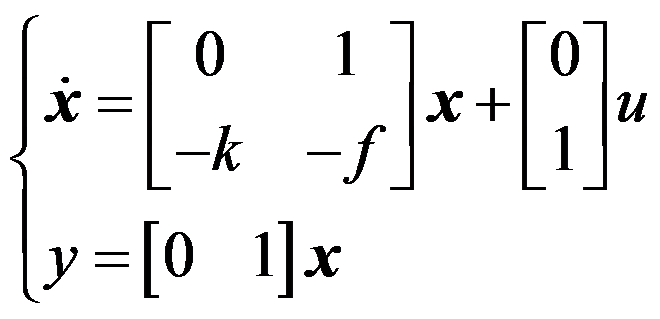
B: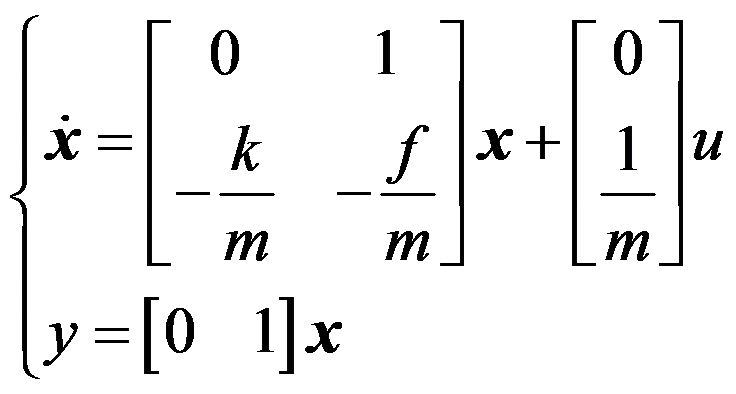
C: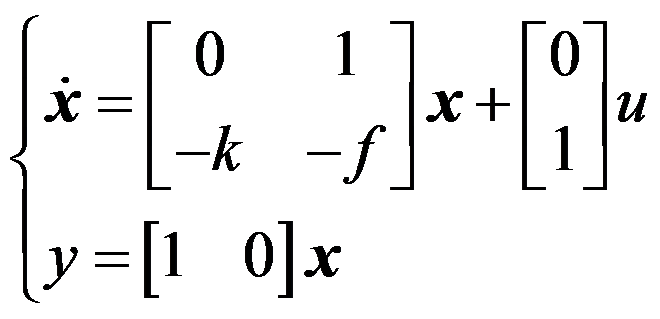
D: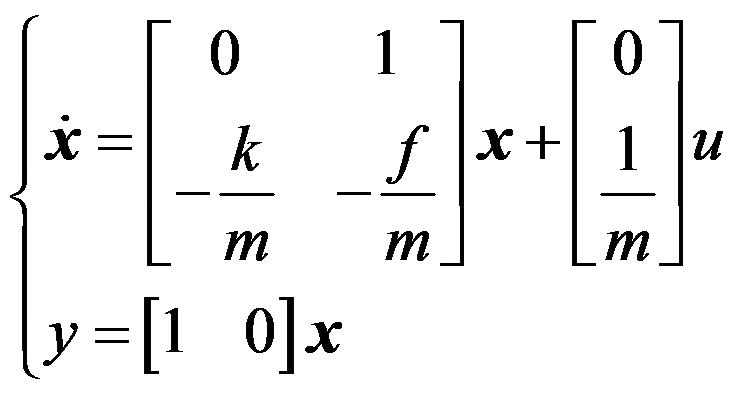
答案: 【
】
6、单选题:
已知单输入单输出系统的微分方程为

其中, 为输入量;
为输入量; 为输出量。则系统状态空间模型为( )。
为输出量。则系统状态空间模型为( )。
选项:
A:
B:
C:
D: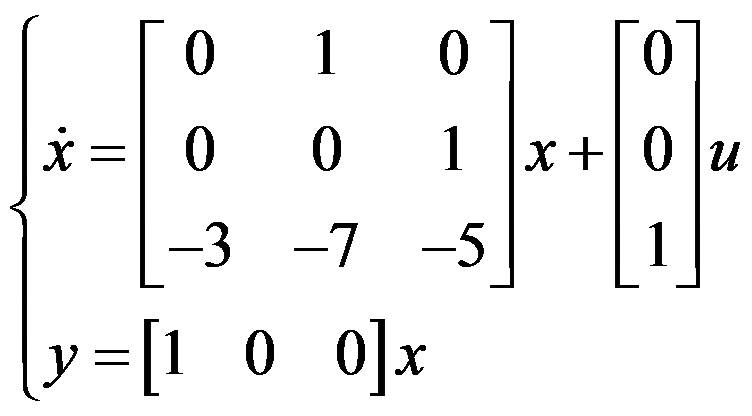
答案: 【
】
7、单选题:
已知系统的状态空间表达式为:
线性变换后对角标准型为( )。
选项:
A: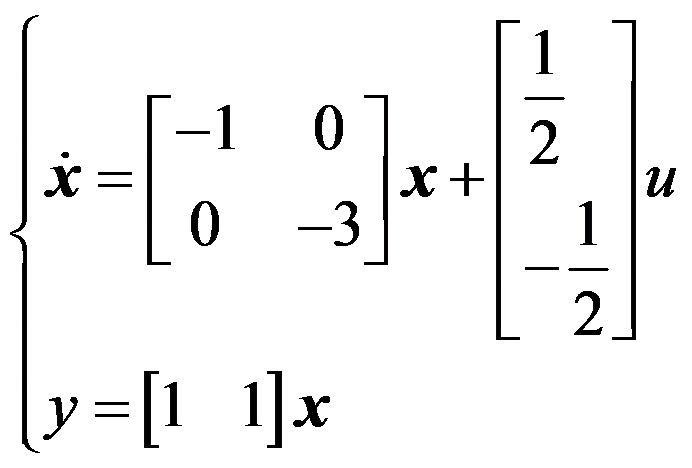
B: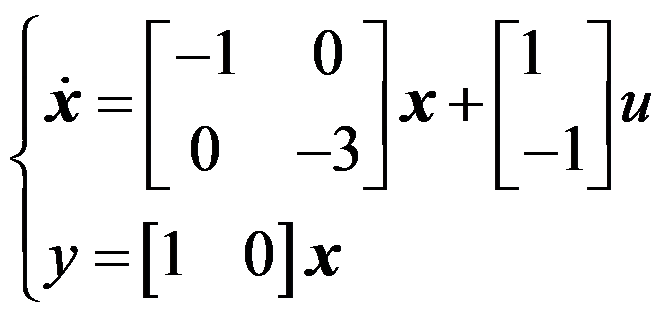
C: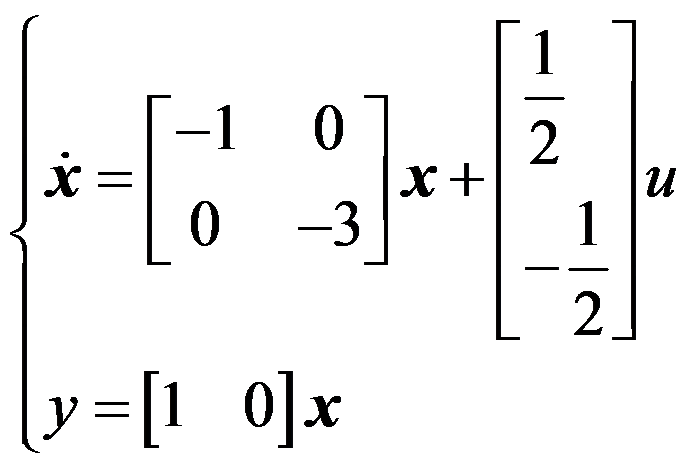
D: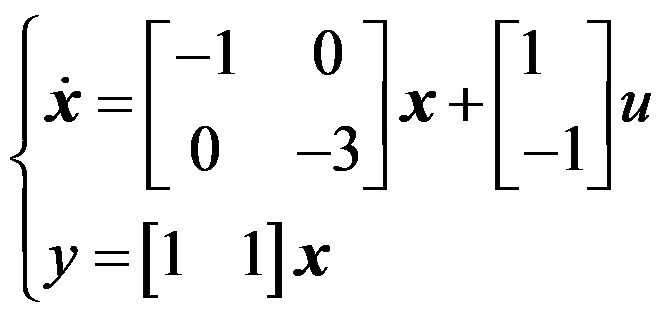
答案: 【
】
8、单选题:
已知系统的传递函数为
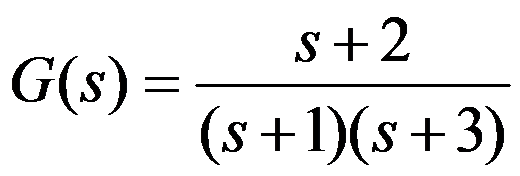
并联分解法建立的状态空间表达式为( )。
选项:
A: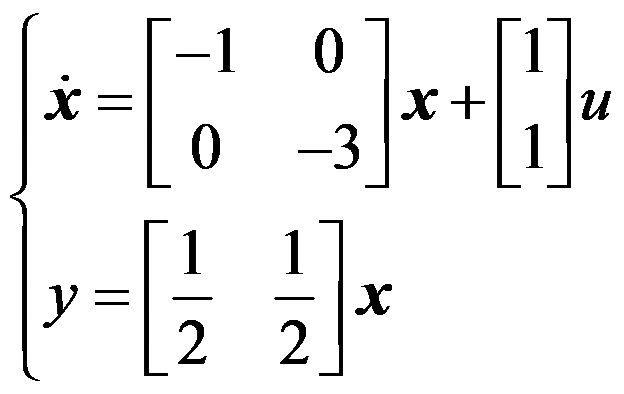
B: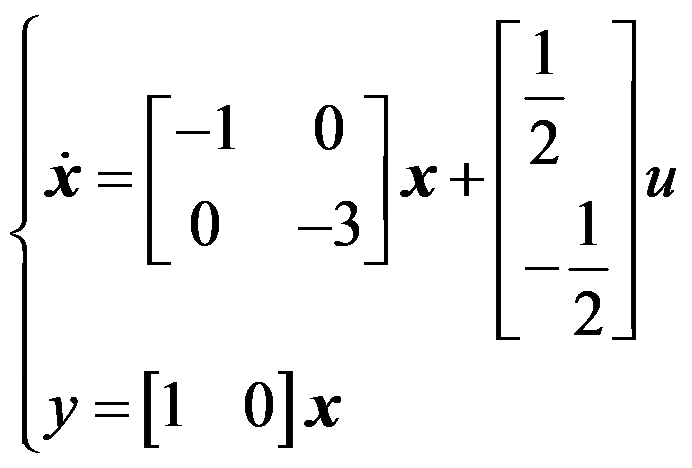
C: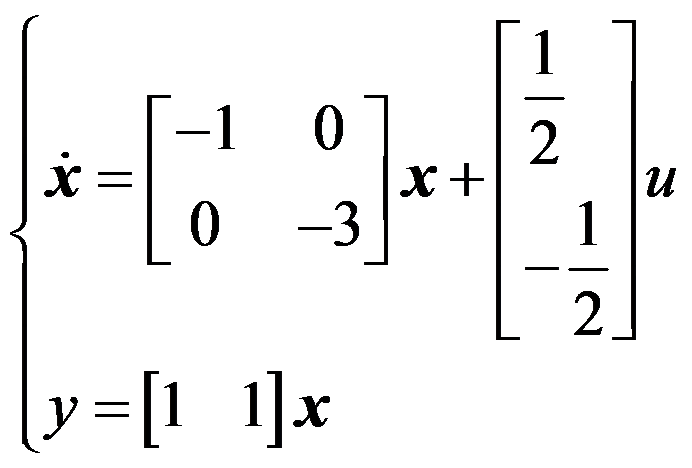
D: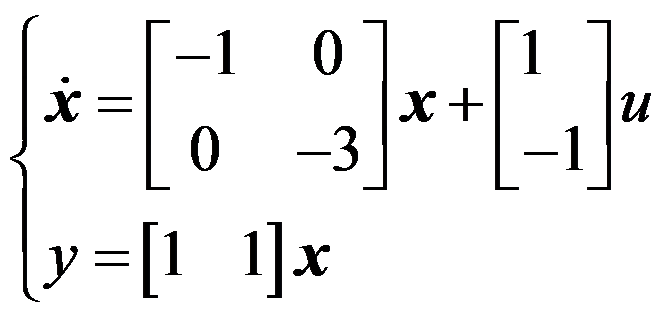
答案: 【
】
9、单选题:
已知两个子系统串联的结构图如下:

串联后组合系统的传递函数阵为( )。
选项:
A:
B:
C:
D:
答案: 【
】
10、单选题:
已知非线性系统的微分方程为:
利用近似线性化方法得到系统的局部线性化状态方程是( )。
选项:
A:
B:
C: ,
,
D: ,
,
答案: 【,
】
第二章 单元测试
1、判断题:
线性系统的响应包含两部分,一部分是零状态响应,一部分是零输入响应。( )
选项:
A:错
B:对
答案: 【对】
2、判断题:
线性系统的状态转移矩阵是唯一的。( )
选项:
A:对
B:错
答案: 【对】
3、判断题:
判定矩阵 是否为状态转移矩阵,只需要判断其是否满足
是否为状态转移矩阵,只需要判断其是否满足 。( )
。( )
选项:
A:错
B:对
答案: 【错】
4、单选题:
不是线性定常系统状态转移矩阵的性质。( )
选项:
A:
B:
C:
D:
答案: 【
】
5、单选题:
系统的状态方程为齐次微分方程 ,若初始时刻为0,
,若初始时刻为0, ,则其解为( )
,则其解为( )
选项:
A:
B:
C:
D:
答案: 【
】
6、单选题:
计算
的矩阵指数函数 为( )
为( )
选项:
A:
B:
C:
D:
答案: 【
】
7、单选题:
求状态转移矩阵
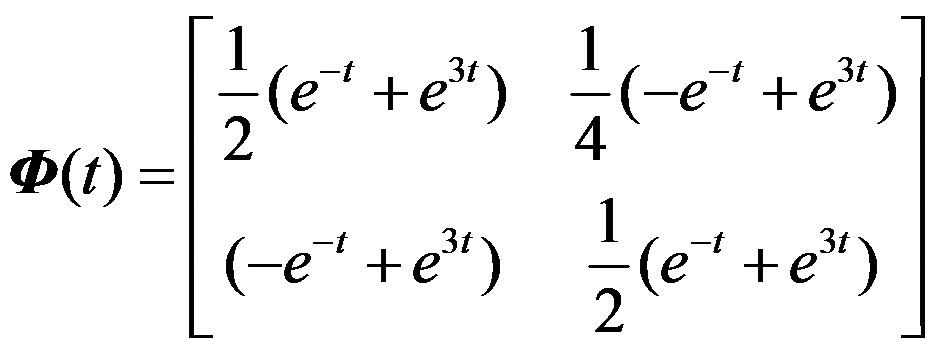
的对应矩阵 为( )。
为( )。
选项:
A:
B:
C:
D:
答案: 【
】
8、单选题:
求状态空间表达式
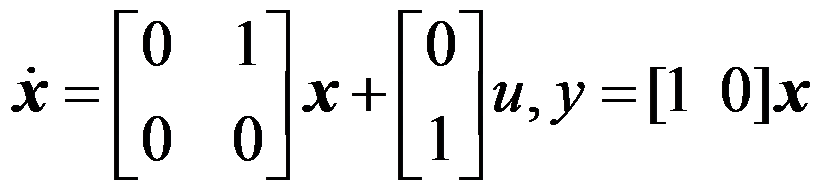
在初始状态 ,输入
,输入 为单位阶跃函数,解为( )
为单位阶跃函数,解为( )
选项:
A:
B:
C:
D:
答案: 【
】
9、单选题:
已知系统的状态方程

输入信号 和
和 分别为阶跃信号和斜坡信号在采样周期为0.2s时的采样值。系统的状态方程的解
分别为阶跃信号和斜坡信号在采样周期为0.2s时的采样值。系统的状态方程的解 为( )
为( )
选项:
A:
B:
C:
D:
答案: 【
】
10、单选题:
线性连续系统 离散化后为
离散化后为 ,其中
,其中 可近似为( )
可近似为( )
选项:
A:
B:
C:
D:
答案: 【
】
第三章 单元测试
1、判断题:
线性变换不改变系统的能控性和能观性。( )
选项:
A:错
B:对
答案:
2、判断题:
能控标准型和能观标准型一定都互为对偶系统。( )
选项:
A:对
B:错
答案:
3、判断题:
单输入单输出系统,若传递函数存在零极点对消,则对应的状态空间表达式不能控且不能观。( )
选项:
A:错
B:对
答案:
4、判断题:
系统 完全能控。( )
完全能控。( )
选项:
A:错
B:对
答案:
5、单选题:
状态空间表达式 是单输入单输出系统的传递函数
是单输入单输出系统的传递函数 的一个最小实现的充分必要条件是( )。
的一个最小实现的充分必要条件是( )。
选项:
A:系统完全能观
B:系统不能控且不能观
C:系统能控且能观
D:系统完全能控
答案:
6、多选题:
下列系统具有能观性的有( )。
选项:
A: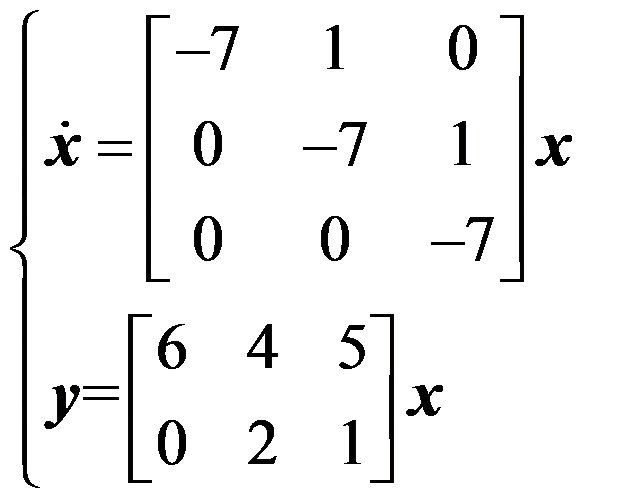
B: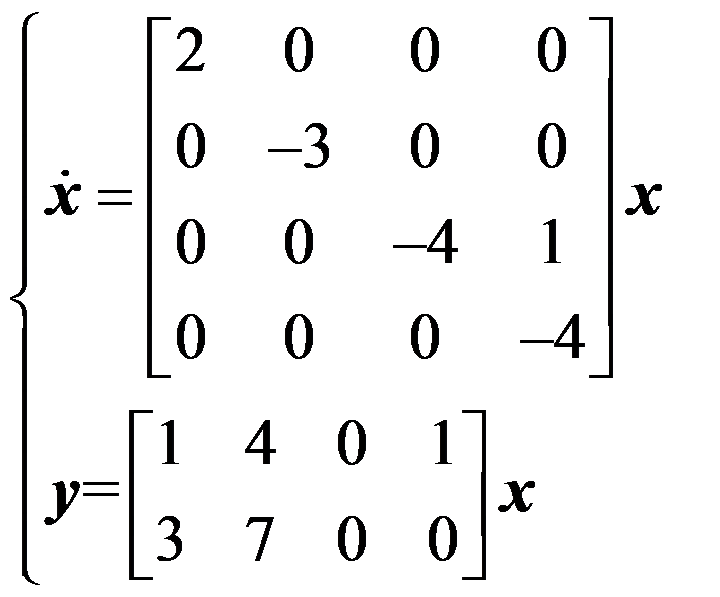
C: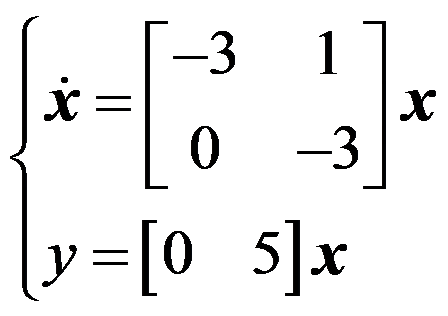
D: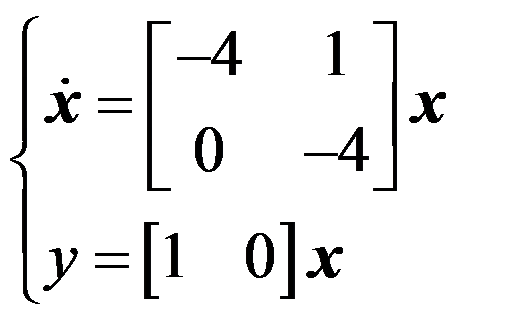
答案:
7、单选题:
系统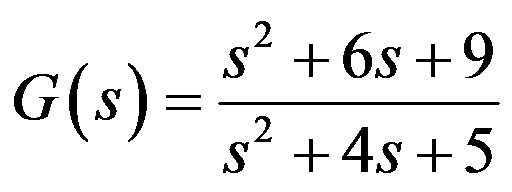 的能观标准形实现为( )。
的能观标准形实现为( )。
选项:
A: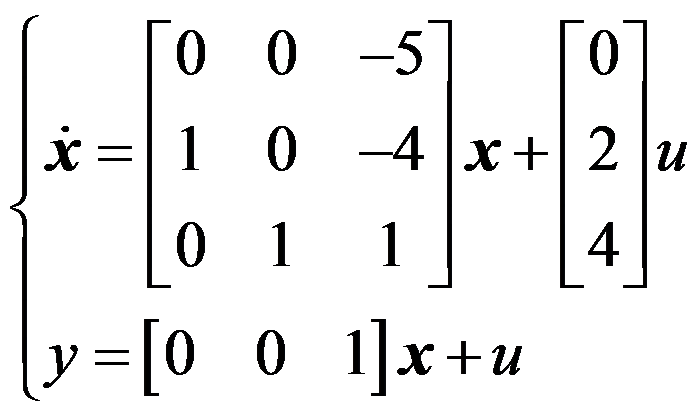
B: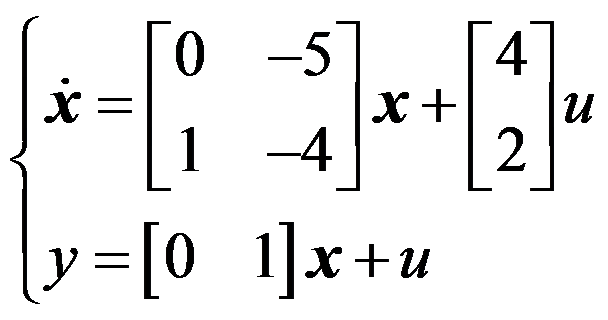
C: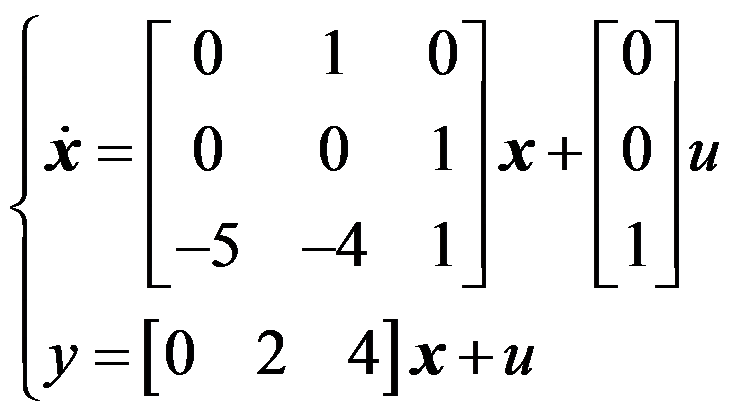
D: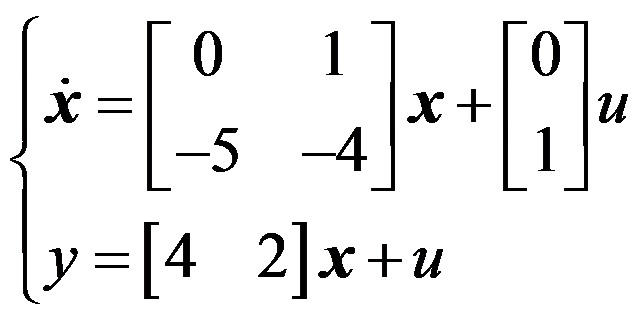
答案:
8、单选题:
若原系统不完全能控,以下( )可将系统按能控性进行结构分解。
选项:
A: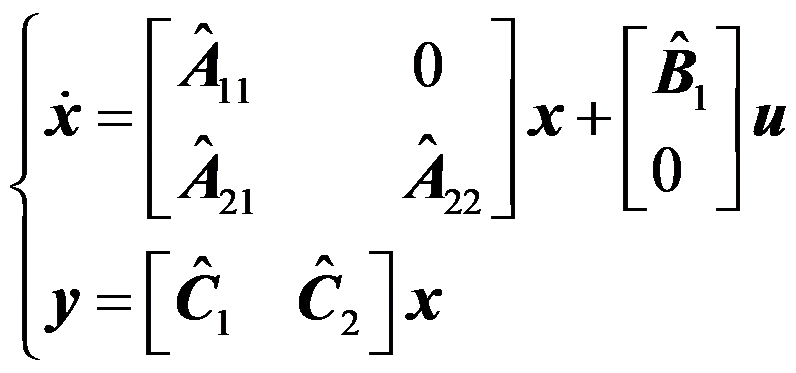
B: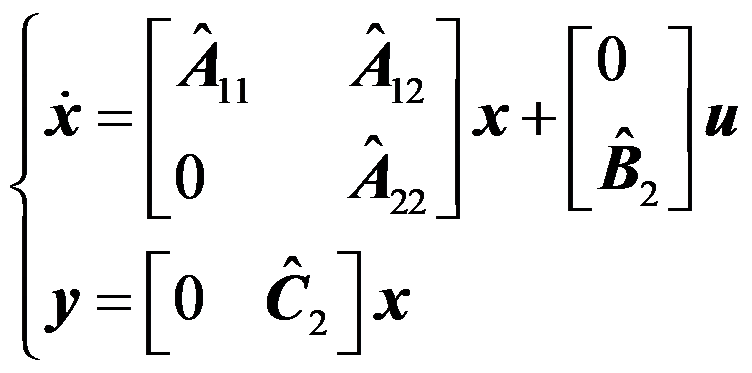
C:
D: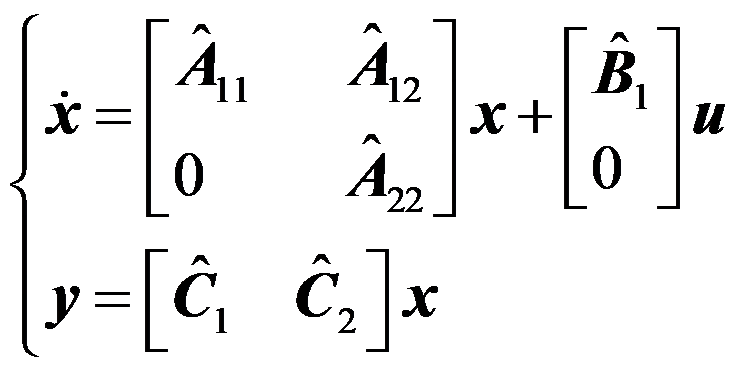
答案:
9、多选题:
传递函数阵

的实现为( )。
选项:
A: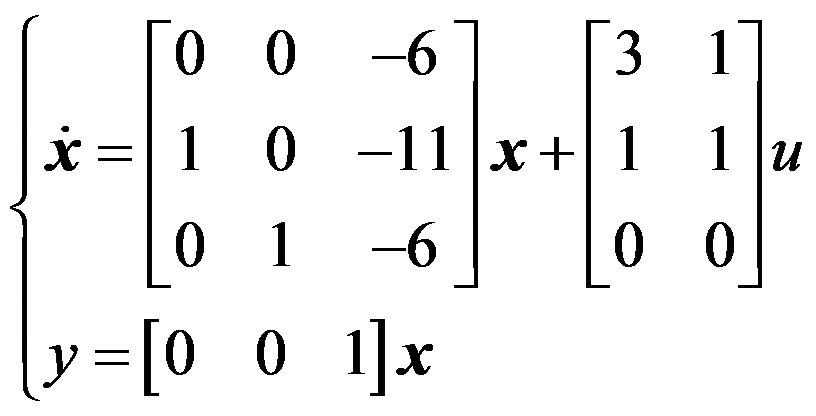
B: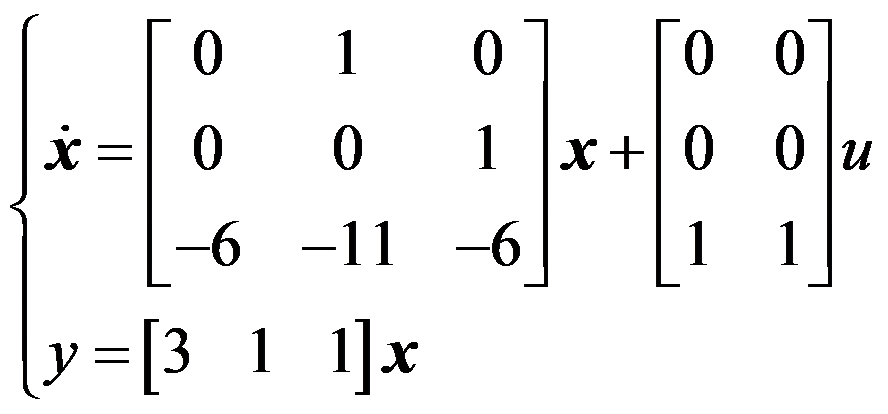
C: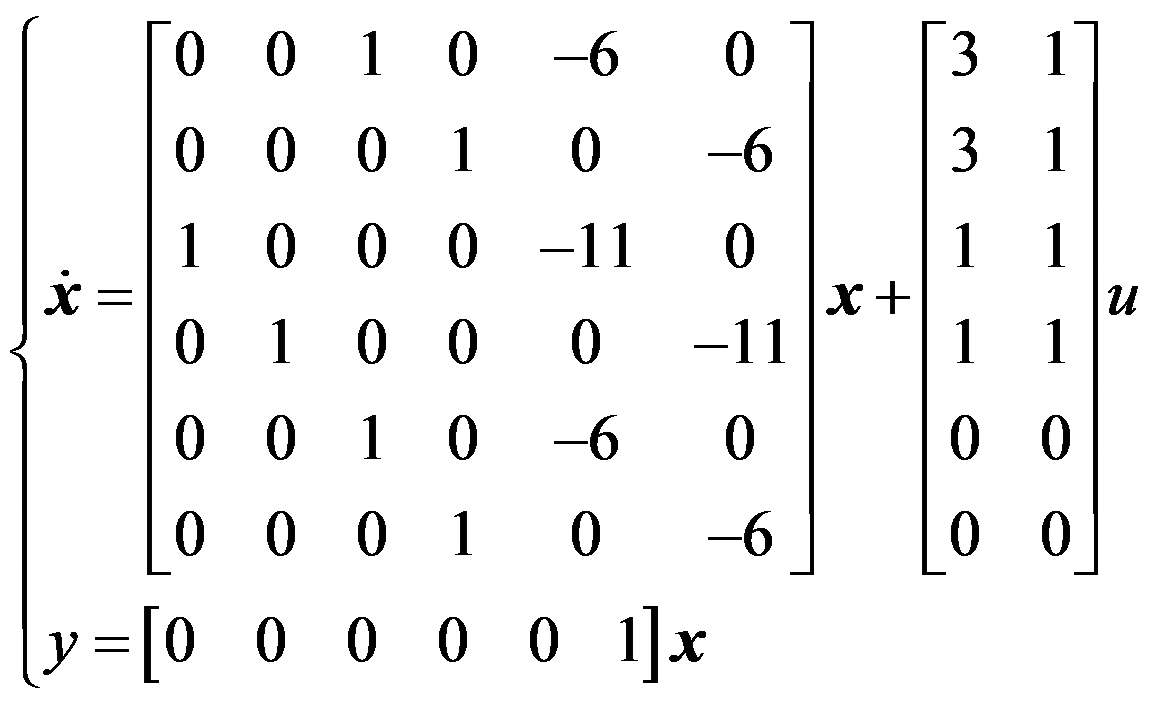
D: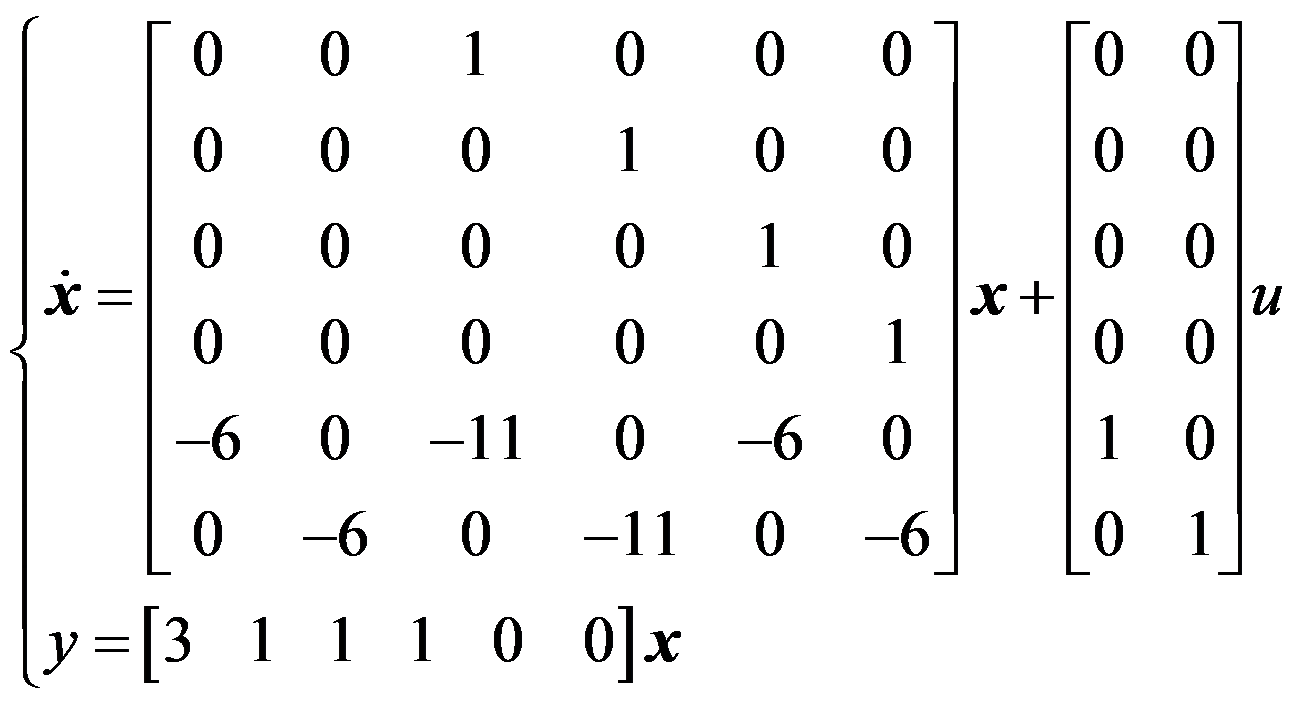
答案:
10、单选题:
传递函数阵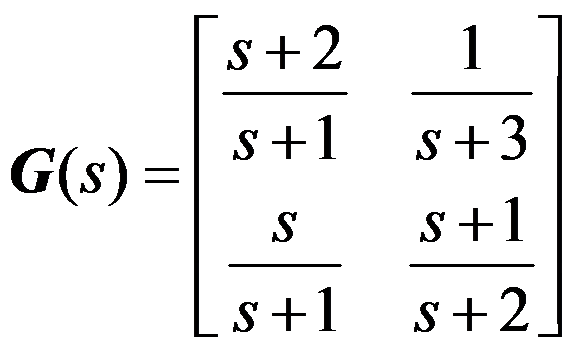 的最小实现是( )维系统。
的最小实现是( )维系统。
选项:
A:2维
B:3维
C:4维
D:6维
答案:
第四章 单元测试
1、判断题:
稳定性问题是相对于某个平衡状态而言的。( )
选项:
A:对
B:错
答案:
2、判断题:
李雅普诺夫函数是正定函数。( )
选项:
A:错
B:对
答案:
3、判断题:
如果一个系统的李雅普诺夫函数确实不存在,那么就可以判定该系统是不稳定的。( )
选项:
A:错
B:对
答案:
4、单选题:
BIBO稳定的含义为( )。
选项:
A:有界输入无界输出
B:无界输入有界输出
C:有界输入有界输出
D:无界输入无界输出
答案:
5、单选题:
 为
为 的特征值,下列说法正确的是( )。
的特征值,下列说法正确的是( )。
选项:
A: ,则
,则 是渐近稳定的
是渐近稳定的
B: ,则系统是渐近稳定的
,则系统是渐近稳定的
C: ,
, ,则系统是不稳定的
,则系统是不稳定的
D:,则系统是李雅普诺夫稳定的
答案:
6、单选题:
试判断二次型函数 的符号特性是( )。
的符号特性是( )。
选项:
A:半正定
B:正定
C:负定
D:半负定
答案:
7、单选题:
关于系统Lyapunov稳定性说法正确的是( )。
选项:
A:系统Lyapunov稳定性是针对平衡点的,只要一个平衡点稳定,其他平衡点也稳定。
B:线性系统Lyapunov局部稳定性等价于全局稳定性。
C:Lyapunov第二法只可以判定一般系统的稳定性,判定线性系统稳定性,只可以采用Lyapunov方程。
D:通过克拉索夫斯基法一定可以构造出稳定系统的Lyapunov函数。
答案:
8、单选题:
Lyapunov 第二法给出了判定稳定性的什么条件( )
选项:
A:非充分必要
B:充分
C:必要
D:充分必要
答案:
9、单选题:
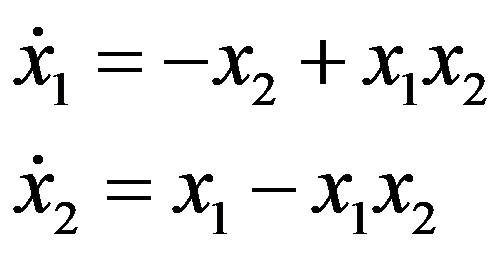
对于非线性系统
可以选取的李雅普诺夫函数为( )。
选项:
A:
B:
C:
D:
答案:
10、单选题:
设系统的状态方程 有唯一的平衡状态
有唯一的平衡状态 ,若存在一个具有连续一阶偏导数的标量函数,满足是渐近稳定的条件是( )。
,若存在一个具有连续一阶偏导数的标量函数,满足是渐近稳定的条件是( )。
选项:
A: 负定,
负定, 负定
负定
B:负定,正定
C:正定,负定
D:正定,正定
答案:
第五章 单元测试
1、判断题:
状态反馈是一种全状态反馈,输出反馈可看作是一种部分状态反馈。( )
选项:
A:错
B:对
答案:
2、判断题:
状态反馈改变系统的能控性和能观性。( )
选项:
A:错
B:对
答案:
3、判断题:
引入状态反馈后系统的系统矩阵A和系统维数均发生变化。( )
选项:
A:对
B:错
答案:
4、判断题:
观测器反馈和直接状态反馈完全等效。( )
选项:
A:对
B:错
答案:
5、单选题:
单输入单输出系统,状态反馈可进行任意极点配置的充分必要条件是( )。
选项:
A:系统完全能观
B:系统能控且能观
C:系统完全能控
D:系统不能控且不能观
答案:
6、单选题:
对于线性定常系统 ,状态观测器存在的充要条件是( )。
,状态观测器存在的充要条件是( )。
选项:
A:能观子系统渐进稳定
B:能控子系统渐进稳定
C:不能控子系统渐进稳定
D:不能观子系统渐进稳定
答案:
7、单选题:
设系统的传递函数为 ,状态反馈控制器( )可以使得闭环系统的极点为-2,-1+j和-1-j。
,状态反馈控制器( )可以使得闭环系统的极点为-2,-1+j和-1-j。
选项:
A:K=[1 3 4]
B:K=[4 3 1]
C:K=[1 4 3]
D:K=[4 1 3]
答案:
8、多选题:
有效的状态观测器系统有( )。
选项:
A: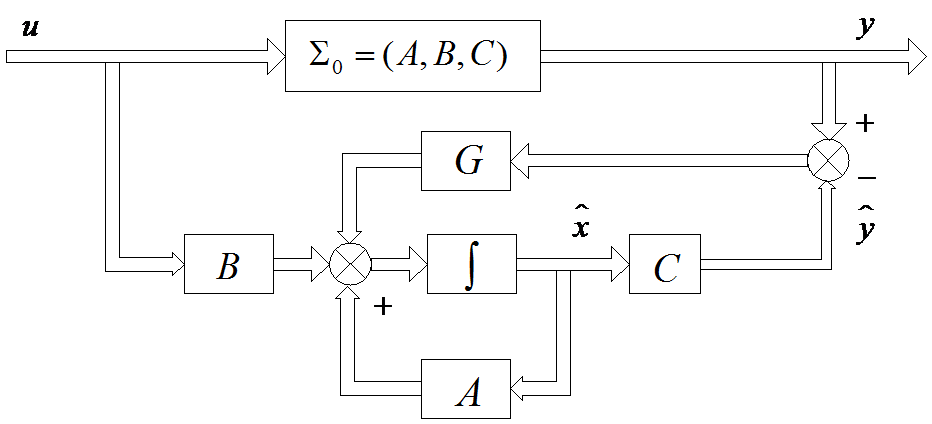
B:
C: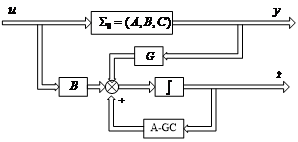
D: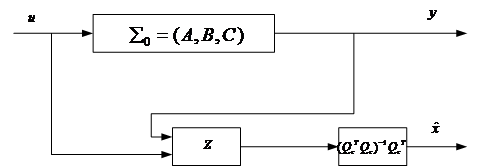
答案:
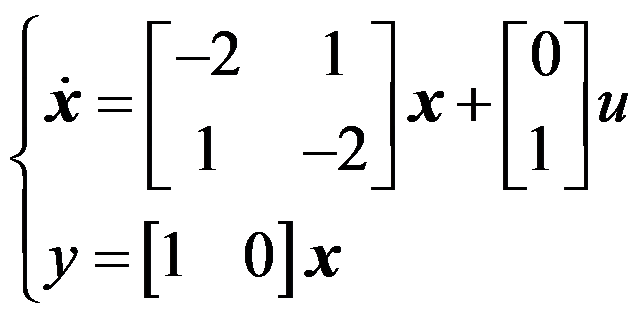
9、单选题:
设系统的状态空间表达式为:
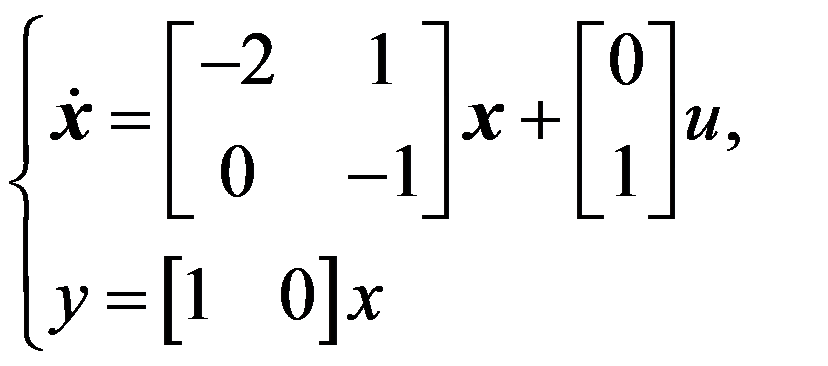
状态观测器( )可以使得观测器的极点为-3,-3。
选项:
A: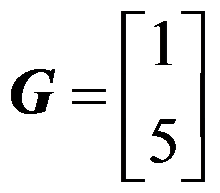
B:
C:
D:
答案:
10、单选题:
设系统的状态空间表达式为:
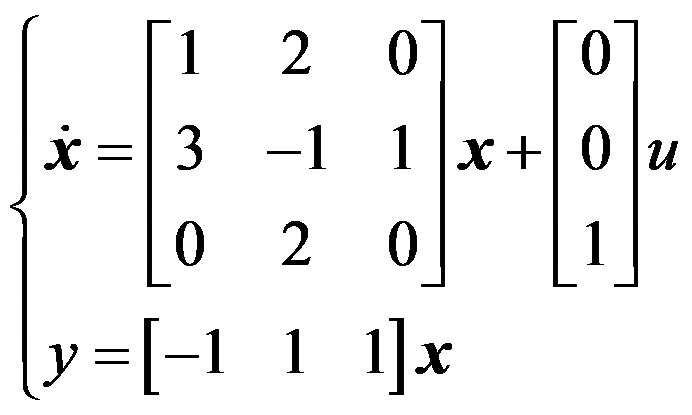
则该系统的最小维状态观测器是( )维系统。
选项:
A:3维
B:1维
C:2维
答案:



请先 !